惯导定位技术
惯性导航系统通过陀螺仪、加速度计以及其他运动传感器的结合实现单终端无基站定位。通过给惯性导航系统提供初始位置及速度,对运动传感器的信息进行整合计算,不断更新当前位置及速度。 通过检测系统的加速度和角速度,惯性导航系统可以检测位置变化(如向东或向西的运动),速度变化(速度大小或方向)和姿态变化(绕各个轴的旋转),它不需要外部参考点的特点使它自然地不受外界的干扰或欺骗。
陀螺仪在惯性参照系中用于测量系统的角速率,通过以惯性参照系中系统初始方位作为初始条件,对角速率进行积分,就可以时刻得到系统的当前方向。这可以想象成被蒙上眼睛的乘客坐在汽车中,感觉汽车左转、右转、上坡、下坡,仅根据这些信息他知道了汽车朝哪里开,但不知道汽车是快,是慢或是否汽车滑向路边。
加速度计在惯性参照系中用于测量系统的线加速度,但只能测量相对于系统运动方向的加速度(由于加速度计与系统固定并随系统转动,不知道自身的方向)。这可以想象成一个被蒙上眼睛的乘客在汽车加速时向后挤压座位,汽车刹车时身体前倾,汽车加速上坡时下压座位,汽车越过山顶下坡时从座位上弹起,仅根据这些信息,乘客知道汽车相对自身怎样加速,即向前、向后、向上、向下、向左 或向右,但不知道相对地面的方向。
通过跟踪系统当前角速率及相对于运动系统测量到的当前线加速度,就可以确定参照系中系统当前线加速度。以起始速度作为初始条件,应用正确的运动学方程,对惯性加速度进行积分就可得到系统惯性速率,然后以起始位置座作初始条件再次积分就可得到惯性位置。惯性导航系统传感器的小误差会随时间累积成大误差,其误差大体上与时间成正比,因此需要不断进行修正。现代惯性导航系统使用各种信号(例如全球定位系统及磁罗盘等)对其进行修正,采取控制论原理对不同信号进行权级过滤,保证惯性导航系统的精度及可靠性。
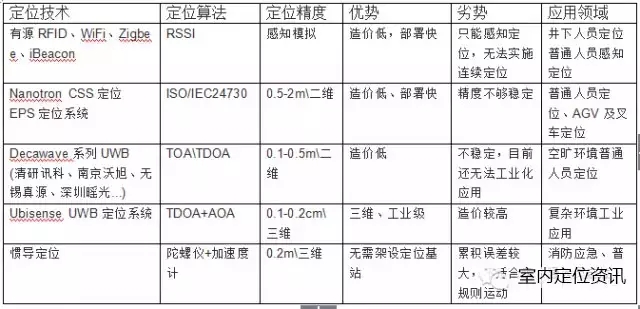
对各个定位技术的优劣做个统计表:












 粤公网安备 44010602004351号
粤公网安备 44010602004351号