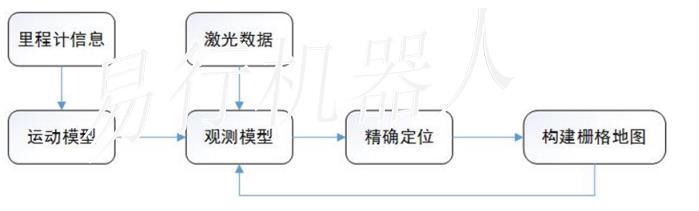
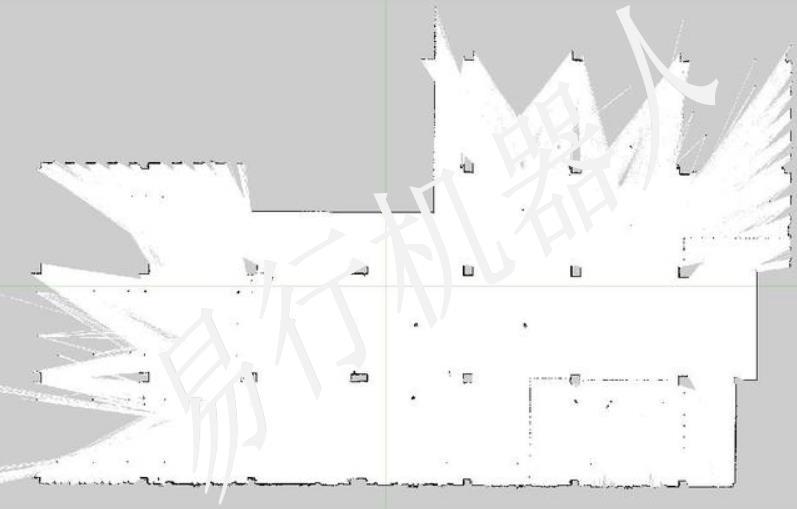
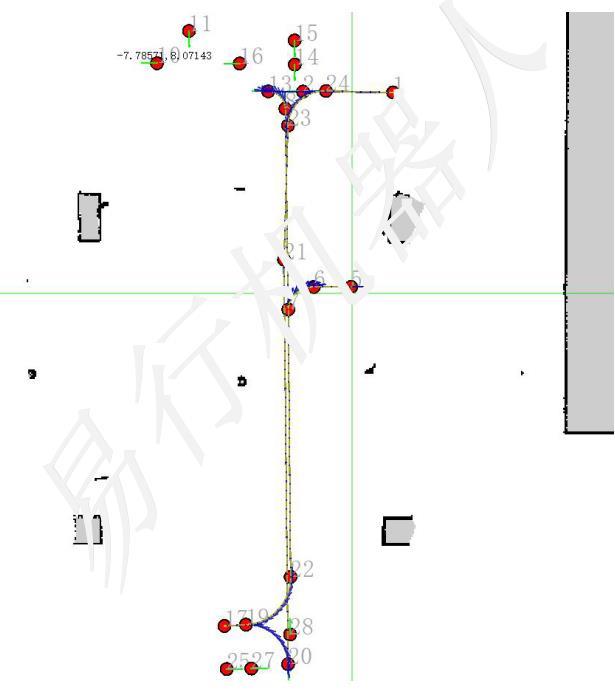
在完成场景地图构建后,需要在所构建的地图基础上进行基于地图的位置和路径规划来实现叉车AGV的导航。叉车AGV运动过程中,通过里程计信息结合激光传感器获取的激光数据与地图进行匹配,不断地实时获取AGV在地图中的精确位姿,同时,根据当前位置与任务目的地进行路径规划(动态路线或者固定路线,且每次的路线都略微不同),根据规划得到的轨迹给叉车AGV发送控制指令,使叉车AGV实现自动行驶。
2025-06-07 15:24
2025-06-07 15:22
2025-06-06 13:54
2025-06-06 13:47
2025-06-01 18:37
2025-05-31 19:52
2025-05-31 19:49
2025-05-26 12:52
2025-05-26 09:00
2025-05-22 15:01





















 粤公网安备 44010602004351号
粤公网安备 44010602004351号