ABB工业机器人从技术角度解析
最先进的控制软件系统
控制柜附带USB接口及网线接口,程序文件可自由存储、加载。
机器人程序为文本格式,方便在电脑上编辑。
轨迹转角处运动速度恒定。
控制系统屏蔽性能优异,不受高频信号干扰。
随机附带Robot Studio软件,可进行3D运行模拟及联机功能(复制文件、编写程序、设置系统、观察I/O状态、备份及恢复系统等多种操作)。
与外部设备连接支持DeviceNet、ProfiBus、InterBus等多种通用工业总线接口。也可通过标准输入输出接口实现与各种品牌焊接电源、切割电源、PLC等的通讯。
可自由设定起弧、加热、焊接、收弧段的电流、电压、速度、摆动等参数。可自行设置实现双丝焊接的参数控制。
提供摆焊设置功能,自由设定摆幅、频率、摆高、摆动角度等参数,可实现偏心摆动等各种复杂摆动轨迹。
配合SmarTAC及AWC功能可实现对复杂焊缝的初始定位,及焊接过程中的路径自动修正。
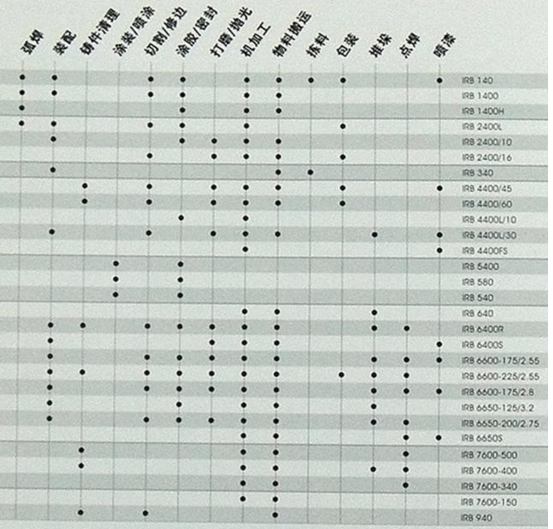
机器人应用
选型依据
动作范围
定位精度
手腕负载
使用场合
外轴配置












 粤公网安备 44010602004351号
粤公网安备 44010602004351号