
在物联网 (IoT) 和工业 4.0 时代,内部物流发挥着越来越重要的作用。高效生产的关键因素是货物和材料的精确运输。Evocortex 的移动运输系统以非凡的方式完成了这项任务。实施创新技术概念的另一个决定性因素是所用 FAULHABER 发动机的功率密度。
如今,“生产”已成为“复杂”的代名词。它越来越经常根据个别客户的指导方针进行。由于与物联网的集成,即使在完全自动化的情况下,也可以生产一系列只有一件。如此大量的变体需要紧密联锁,同时需要非常灵活的过程。正确的零件和组件,几乎无限数量的组合,必须在正确的时间在正确的生产站准备好。
AMR 车辆的优势
物料的搬运,例如供应点和生产系统之间的运输,变得越来越个性化。同时,它必须是完全自动化的。在这种情况下,移动机器人平台,在业界被称为自主移动机器人 (AMR),在世界各地的仓库和生产车间中获得优势。
这一细分市场是总部位于德国纽伦堡的 Evocortex 初创公司的重点,该公司于 2016 年与经验丰富的机器人专家合作成立。该公司与邻近的技术学校 (Technische Hochschule Nürnberg) 和其他教育和研究机构紧密相连,以全新的 AMR 概念进入市场。除了产品,公司还提供满足现代物流要求的创新解决方案。
传统的 AMR 系统通常需要在跟踪甚至对流程进行技术修改方面进行空间调整,总经理 Hubert Bauer 解释说。-除其他事项外,还需要光学标记以确保输送机的正确方向,并且路径和交叉口必须具有特定的尺寸和曲线半径。我们想创造能够适应客户需求的运输机器人,而不是相反。
凭借对地板形状的记忆,精确识别位置
Evocortex 自主移动机器人 (AMR) 无需任何辅助系统即可确定其位置并找到正确的路径。他们根据大厅地板的不平整度来确定自己的方向。这种不规则现象甚至出现在标准光滑的混凝土地板上。它们由高分辨率机器人相机捕获。摄像头位于传送带的底部,能够捕捉 10 x 10 厘米的图像,并使用其中的数据从大厅地板上创建相当于“指纹”的图像。这个创新系统的核心是我们的本地化模块 (ELM)。

在初始学习过程中,机器人以网格模式在地板上移动。使用复杂算法从单个点形成的模式创建非常详细的地图。未来,一个自学习的人工智能将负责这个过程。此外,控制器检查输送机自身的运动。通过结合数据,它可以 - 理论上在一平方公里的区域内 - 精确到毫米的定位。为此,它只需要三个识别点。ELM 系统稳定、精确和准确,即使 50% 的地板被锯末覆盖。地板上新形成的永久性划痕会添加到地图中,而消失的元素会在一段时间后被移除。
AMR 系统可以选择在一个或两个正面配备额外的激光雷达传感器。它们沿行进方向扫描房间并检测障碍物——包括那些正在移动的障碍物,例如穿过轨道的人。传送带立即停止以确保工人安全。
麦克纳姆轮带来无限的机动性
标准车轮仅沿与其轴相同的方向运行。要使用此类轮子精确定位输送机,请以与停车时相同的方式进行操作。为了避免这种情况,Evocortex 的设计师决定使用 Mecanum 车轮。车轮没有封闭的运行表面 - 相反,桶形滚轮围绕其周边放置。它们与车轮的轴线成 45 度角连接,并且可以围绕自身轴承的倾斜轴线旋转。选择滚子的形状、尺寸和间距,以提供具有连续滚动表面的轮子。


转动麦克纳姆轮时,会产生两个分力:在整个车轮的旋转方向上和与该方向成直角。由此产生的运动方向位于中心:麦克纳姆轮“想要”以与轴向方向成 45 度角移动。但是,由于滚轮的移动性,它不具有方向稳定性。如果有额外的力量,可以自由修改车轮运动的自我方向。

在 Mecanum 四轮输送机中,每个 45 度角都以 90 度偏移定位。所以每个轮子都试图朝不同的方向移动。通过改变各个轮子的旋转方向和速度,输送机可以从其静止位置沿任何方向引导或转动到位。因此,在水平面上,它可以像气垫船一样自由移动。因此,麦克纳姆轮能够实现机器人的动态和多向运动。
以毫米为单位可扩展
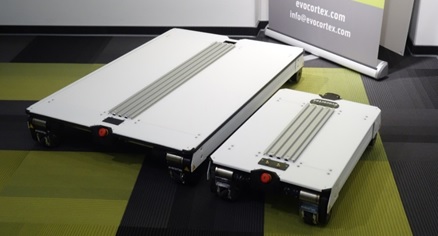
Evocortex 的 AMR 系统具有另一个维度的灵活性:几乎无限的尺寸选择。- 如有必要,我们可以以毫米级精度调整机器人以适应客户的要求 - Hubert Bauer 强调说。- 我们可以实现从 400 x 480 到 800 x 1200 mm 的任何外部尺寸。
EvoRobot R&D 和 EvoRobot Industrial 系列的产品也大致对应于承重平台的外部尺寸。所有技术元件——传感器、控制器、千斤顶和轮驱动——都位于平台下方。

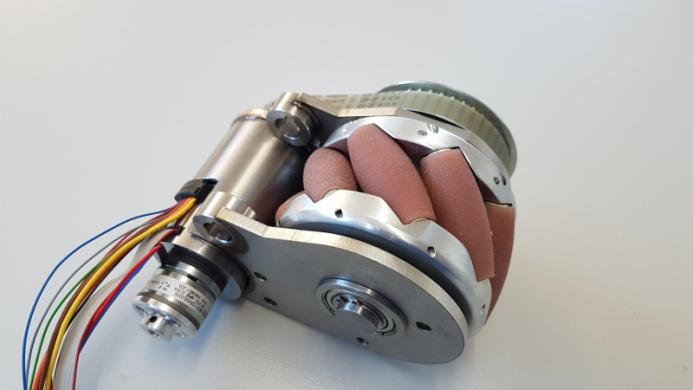
这种可扩展性的一个关键组件是轮驱动模块。它位于车轮的正上方,并与它一起形成一个标准的独立单元。因此,车轮可以彼此相距任何距离。这种系统的决定性元素是一个强大且非常小的引擎。
“我们非常仔细地研究了市场,以找到满足该应用要求的发动机,”Hubert Bauer 回忆起设计阶段时说。-所需的功率密度仅由 FAULHABER 发动机提供。竞争对手的发动机缺乏所需的扭矩。
强大的力量,最小的尺寸

控制
AGV 和 AMR :控制和导航
乍一看,自动导向车 (AGV) 及其进化的自动驾驶汽车 (AMR) 并没有什么不同。分配给他们的任务也是一样的。这些车辆之间的主要区别在于它们的控制和导航方式。AMR 车辆领域的更大灵活性意味着它们将成为工业厂房和仓库运输的未来。

机器人、装配和服务
适用于 AMR 和 AGV 卡车的 IEI 计算机
许多公司越来越多地决定在仓库中使用自动驾驶汽车来执行以前只委托给员工的任务。特别流行的自动驾驶汽车,不仅在物流公司中,还有移动机器人(AMR)和自动驾驶汽车(AGV)。
EvoRobot 车轮模块配备 3257…CR 或 3272…CR 系列直流电机。每个都有一个IEF3编码器和一个38/2 S齿轮,为了保证停车后车轮的快速停止和锁定,车轮电机还配备了制动器。
-由于微型电机的强大动力,EvoRobot 最多可以运输 200 公斤。Hubert Bauer 解释说,很快就会有更大的负载。-也可以在高达 5 度的斜坡上以每秒一米的速度运输。
EvoCarrier 产品线设计用于运输小型货物输送机。对于 AMR 系统的内部组件,空间限制甚至比 EvoRobot 更大。与地面的距离不超过 100 毫米。因此,它适合运输货物下方的非常小的间隙。两个或四个 EvoCarrier 也可以一起运输托盘或整个货架单元。设计师选择了所谓的“平转子电机” - 4221…BXT 系列无刷电机,只有 21 毫米长。这使得 EvoCarrier 能够运输装载总重量高达 120 公斤的小型载重车 (KLT) 的地面车辆。
除了功率尺寸比,AMR自走卡车在运行中的一个重要作用主要是维护的零需求和持续运行的可靠性。
“FAULHABER 发动机超出了我们的使用寿命要求。”Hubert Bauer 说。他们的下一个优势是他们与工业中常用的所有控制系统的兼容性。FAULHABER 专家还帮助我们确定了批量生产参数的最佳设置。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号