“你是我的眼~带我领略四季的变换~你是我的眼~带我穿越拥挤的人潮~你是我的眼~带我阅读浩瀚的书海~因为你是我的眼~让我看见这世界就在我眼前~就在我眼前~”
随着信息技术以及计算机科学的发展,人工智能逐渐成为各个领域的研究热点,作为人工智能典型代表的AGV移动机器人进入了新的研究热潮,机器人避障是AGV技术领域中活跃的研究分支。在AGV移动过程中,障碍物检测是机器人安全避障的前提条件和基本功能,视觉引导具有不可代替的优越性,因此移动机器人视觉障碍物检测具有重要的研究价值与实践意义。
目前利用超声波、红外线、激光雷达、彩色摄像头、多传感器融合进行障碍物检测时,会存在较多的问题,如不能获取障碍物目标的边界信息、计算量大以及融合算法复杂,对传感器同步要求较高影响工作效率,增加运行所需的能耗等。针对上述的问题,提出基于双目深度摄像头作为传感器来进行障碍物检测以及避障的方案。
双目深度相机具有体型小、功耗低、分辨率较高及实时性较高等优点。它就像是AGV的“眼睛”,凭借这双眼镜AGV能够获取周围的世界的深度信息,可以让AGV获取周围世界的三维信息。AGV“眼睛”的加入解决了二维激光只能扫描一个平面来进行避障的局限性,在避障方面有更多的用途和更大的优势。

工作原理
解决机器人如何“看”的问题,也就是大家常听到的计算机视觉。其基础在于如何能够从二维的图像中获取三维信息,从而了解我们身处的这个三维世界。
视觉识别系统通常来说可以包括一个或两个摄像头。单一的照片只具有二维信息,犹如2D电影,并无直接的空间感,只有靠我们自己依靠“物体遮挡、近大远小”等生活经验脑补。故单一的摄像头获取到的信息及其有限,并不能直接得到我们想要的效果。类比到机器视觉中,单个摄像头的图片信息无法获取到场景中每个物体与镜头的距离关系,即缺少第三个维度。
双目立体视觉犹如3D电影,能够直接给人带来强烈的空间临场感。类比机器视觉,从单个摄像头升级到两个摄像头,即立体视觉能够直接提供第三个维度的信息,即景深,能够更为简单的获取到三维信息。双目视觉最常见的例子就是我们的双眼:我们之所以能够准确的拿起面前的杯子、判断汽车的远近,都是因为双眼的双目立体视觉,而3D电影、VR眼镜的发明,也都是双目视觉的应用。
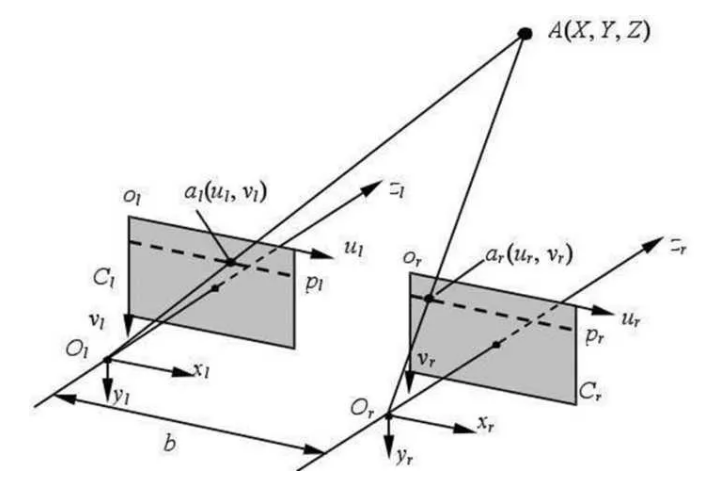
双目视觉的基本原理是利用两个平行的摄像头进行拍摄,然后根据两幅图像之间的差异,利用一系列复杂的算法计算出特定点的距离,当数据足够时还能生成深度图。













 粤公网安备 44010602004351号
粤公网安备 44010602004351号