近年来,随着无人驾驶技术的深入,越来越多诸如激光雷达和视觉传感器被用于室外环境感知;同时,GPS、北斗等全局导航系统也被广泛的使用进行无人驾驶汽车的道路规划以及位置检测。
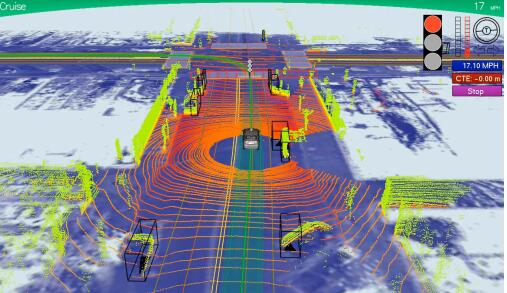
无人驾驶汽车上的多传感器对环境的感知
由室外到室内,随着“中国制造2025”和“互联网+”的深入实施,智能物流仓储 的市场规模预计可达万亿规模。激光雷达等传感器同样被用于有“室内无人汽车”之称的AGV上。在和国内知名激光雷达厂商进行项目合作的过程中,灵踪科技真正诠释了“打造室内北斗卫星,提供精准位置服务”的初心。

低差异化的环境特征影响激光雷达和视觉模块正常定位
灵踪室内定位技术为机器人提供了类似北斗定位系统的全局定位服务,使得机器人掌握全局图景,不再“迷路”。该系统能够和现有的基于局部感知的SLAM的方案形成完美的互补。当前,SLAM方案得到许多成功应用,但在实际中也存在一些局限:
1-SLAM部件完成地图建构后,如果机器人被人为移动,就会有可能丢失定位,失去对整个环境的对准,需要人工介入,才能完成后续的导航功能;
2-工业场景中一些关键位置对定位精度要求高,激光雷达或视觉传感器需要使用其他的方式提供进一步精确的位置信息。比如在AGV需要对接的生产线出料口位置,毫米级定位要求急需额外的定位设施;
3-在某些平面仓库货物布局频繁变动情况下,激光雷达或视觉依赖的环境特征被破坏,AGV容易丢失位置,从而需要一些辅助装置进行位置校准。
2025-11-02 09:56
2025-11-01 09:48
2025-11-01 09:43
2025-10-28 20:01
2025-10-26 08:50
2025-10-24 10:08
2025-10-23 13:13
2025-10-23 09:11
2025-10-22 09:07
2025-10-22 09:07




















 粤公网安备 44010602004351号
粤公网安备 44010602004351号