日本科学家开发出一种基于视觉的软传感器,可以检测柔性机械臂中的触摸和接近物体。
由日本先进科学技术大学院大学(JAIST)Van Anh Ho教授和Quan Khanh Luu博士领导的研究团队开发了ProTac,这是一种基于视觉的新型机器人软感知“皮肤”。该研究于2025年7月28日发表在《IEEE机器人学报》上,为机器人与人类之间的安全协作提出了突破性的解决方案。
PDLC技术的实际应用
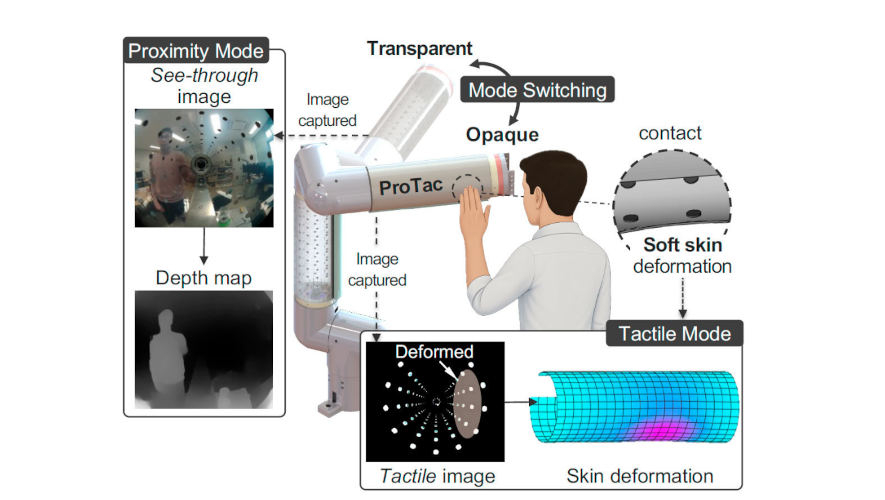
ProTac 系统的核心是一层带有分布式液晶 (PDLC) 的聚合物层,当施加电压时,它会在透明和不透明状态之间切换。在透明模式下,内置摄像头会透过“皮肤”检测附近的物体。在不透明模式下,它们会追踪表面变形,使机器人能够感知触摸、压力和接触位置。
这种双模式感知技术可在大面积范围内实时运行,无需复杂的嵌入式电子设备。该解决方案显著简化了传感器设计,同时保持了高功能性。
原型和可能性
研究人员已经构建了一个原型 ProTac 链接——一个圆柱形机械臂段,其末端带有柔软的传感皮肤和立体摄像头。该系统可以从多个角度检测接近的物体,估算距离,并高精度识别触点。它支持自适应行为,例如根据与障碍物的距离调整速度。
工业应用
ProTac 应用于协作机器人领域,安全至关重要。在工厂中,当工人靠近时,机器人可以自动减速。在医疗保健领域,它们可以实现安全的物理接触。得益于模块化设计,该系统可以与新的和现有的机器人平台集成。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号