在工厂和仓库的作业场景中,叉车事故常被贴上 “意外”“操作失误” 的标签,但深入分析会发现:几乎所有致命事故,都不是单一环节出错的结果 —— 就像瑞士奶酪的多层切片,每一层都代表一道安全屏障,若每层的 “孔洞”(漏洞)恰好对齐,风险便会穿透所有屏障,最终酿成悲剧。
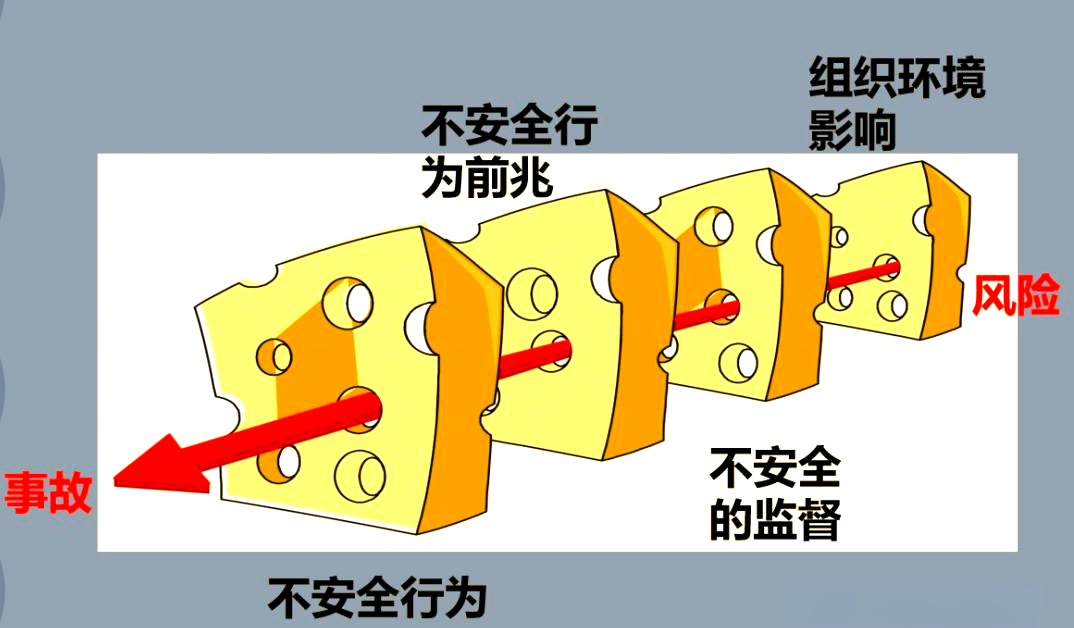
瑞士奶酪模型(Swiss Cheese Model)由安全学家詹姆斯・瑞森提出,核心逻辑是:安全防护由多层屏障构成,每层都可能存在漏洞;当所有屏障的漏洞在同一时间、同一轨迹上重合时,事故必然发生。
一、叉车安全的 “5 层奶酪片” 是什么?
对于叉车安全而言,这道 “防护奶酪” 至少包含 5 层核心屏障 —— 管理体系、人员培训、设备维护、现场环境、个人操作。
| 安全屏障 (奶酪层) | 核心作用 | 常见 “孔洞”(漏洞) |
| 安全管理体系 | 明确规则、落实责任,划分人车安全边界 | 人车分流制度不落地、安全检查走过场、考核重效率轻安全 |
| 人员培训与资质 | 让司机懂避让、行人知风险,双方具备安全意识 | 司机培训缺 “行人避让” 模块、行人未接受叉车风险教育、复训缺失 |
| 设备维护与技术防护 | 用设备预警减少 “看不见” 的风险,辅助司机感知环境 | 盲区探测装置失效、警示灯 / 喇叭损坏、无倒车影像等 |
| 现场环境管控 | 消除环境盲区,明确人车通行路线 | 通道无隔离、拐角遮挡视线、缺少 “叉车通行” 警示标识 |
| 个人安全意识 | 司机主动观察、行人主动避让,是最后防线 | 司机分心操作、行人闯入作业区、双方均存侥幸心理 |
在叉车作业的全流程中,5 层 “奶酪片” 各司其职,共同阻挡风险。正常情况下,即使某一层有小漏洞,其他层也能 “补位”;但当漏洞对齐,风险便会 “长驱直入”。

模型的直观理解
二、当 5 层奶酪的 “孔洞” 对齐:一起叉车撞人事故的深度拆解
2024 年初,某电子元器件工厂发生一起叉车撞人事故:司机王某驾驶叉车运输电路板托盘时,在车间拐角处撞上正在清理地面的清洁工李某,导致李某腿部粉碎性骨折,车间停工整改 1 周,企业被处以 20 万元行政处罚。用瑞士奶酪模型复盘可见,这起悲剧是 5 层安全屏障的 “孔洞” 精准对齐的结果:
工厂虽在《安全生产手册》中写明 “人车分流”,但未落实任何执行措施:
未划分专门的人行通道与叉车通道,车间内仅用虚线标注 “建议路线”,货物堆积时虚线常被覆盖;
安全管理员每周仅抽查 1 次叉车操作,从未检查 “行人是否违规进入作业区”,也未核实叉车警示装置是否完好;
为赶订单,管理层默许 “叉车优先通行”,曾对提出 “人车混行危险” 的安全员说 “先保证产能,安全后面再说”。
管理的 “孔洞”:规则仅停留在纸面,人车混行的风险失去第一道约束。

司机王某与清洁工李某的安全认知均存在明显短板:
王某虽持有叉车操作证,但培训时仅学习 “货物搬运技巧”,未接受过 “行人避让规范”(如拐角鸣笛、限速观察)培训;工厂近 2 年未组织复训,他不知道 “车间行人密集区需将车速降至 3km/h”;
李某入职时仅被口头告知 “远离叉车”,未学习 “如何识别叉车作业信号”(如喇叭声代表警示),也不清楚 “货架拐角是叉车盲区”;
未开展过 “人车互动模拟演练”,双方都不知道 “遇到对方时该如何避让”(王某以为行人会主动躲开,李某以为叉车会提前减速)。
培训的 “孔洞”:司机缺避让技能、行人缺风险认知,第二道屏障彻底失效。
出事叉车的安全装置早已处于 “失效状态”,却未被及时修复:
右侧警示灯接触不良,仅左侧灯亮,李某从右侧货架后走出时,未看到警示信号;
叉车喇叭音量低于标准值(仅 50 分贝,要求不低于 80 分贝),王某过弯前鸣笛,李某因车间机器噪音未听见;
叉车未安装盲区防撞系统,无法自动识别叉车周围行人发出预警,更没有自动减速刹停装置。
设备的 “孔洞”:技术预警失效/缺失,本可 “兜底” 的第三道防护彻底缺位。

车间环境为事故 “创造了绝佳条件”:
拐角处堆放了 1.2 米高的纸箱(货架与纸箱间距仅 0.8 米),形成 “视觉盲区”—— 王某看不到右侧的李某,李某也看不到驶来的叉车;
通道宽度仅 2 米(人车混行时需至少 3 米),王某为避让左侧的货物,不得不靠近右侧货架行驶,进一步压缩了避让空间;
地面未张贴 “叉车盲区警示标识”,也未安装凸面镜,双方均无法提前预判风险。
环境的 “孔洞”:盲区遮挡、空间狭窄,第四道屏障无法缓冲风险传递。
王某与李某的个人行为成为 “最后一根稻草”:
王某为赶在午休前完成 3 趟运输任务,将车速提至 6km/h(行人密集区限速 3km/h),转弯时未减速,仅快速扫了一眼左侧;
李某为尽快清理完地面油污,未观察周围是否有叉车作业,直接从货架后走出,且未佩戴反光背心(工厂虽发放,但未强制要求穿着);
双方均存侥幸心理:王某觉得 “这个点很少有人走拐角”,李某觉得 “叉车不会开这么快”。
个人的 “孔洞”:侥幸主导行为,最后一道安全防线彻底崩塌。
当管理、培训、设备、环境、个人的 5 个 “孔洞”在 “车间拐角” 这个节点对齐时,叉车撞人的事故从 “可能” 变成了 “必然”。

瑞士奶酪模型的核心价值,不是追求 “消除所有孔洞”(现实中无法实现),而是通过强化每层屏障,让漏洞 “错开”—— 即使某一层出问题,其他层也能阻挡风险。针对叉车撞人场景,可从 5 个维度落地 “补漏” 方案:


















用瑞士奶酪模型解读叉车撞人事故,本质是提醒我们:安全不是 “某个人的事”,也不是 “某一层的事”,而是管理、培训、设备、环境、个人的 “协同作战”。
只有让每层屏障的漏洞尽可能减少、彼此错开,才能让叉车从 “危险机器” 变回 “安全帮手”,让作业区里的每一个人,都能远离 “被撞击” 的风险。
唯创安全,叉车防撞系统领导者,深耕叉车安全管理与智能工厂领域二十余年,以智能传感与数据分析技术为核心,为全球客户提供数智化安全管理与效率提升综合解决方案,是集研发、生产、销售、服务于一体的高新技术企业。
公司核心产品系列——叉车防撞系统深度运用AI 视觉算法、雷达感应技术与UWB测距技术,覆盖叉车、正面吊、装载机等机械设备的智能防碰撞、超速报警、重量管理、车队管理等安全服务,精准构建“人、车、货、场”全场景风险预警与防护。
在物流仓储数智化服务方面,依托智能云平台实现定位追踪、实时监测与智能调度,打通 “工业互联网 + 安全生产” 链路,助力企业实现智能化升级与精益化生产,兼顾安全管理与运作效率的双重提升。
秉承 “以客户为中心” 的服务理念,唯创安全以专业的技术实力、稳定的产品品质和高效的服务响应,为客户提供贯穿需求调研、方案实施到售后运维的全周期优质服务。公司将持续深耕智能安全技术,驱动工业场景数智化变革,守护生产安全。













 粤公网安备 44010602004351号
粤公网安备 44010602004351号