四、按需定制客户方案 按周快速阶段导入
劢微根据客户实际需求,从目标梳理——方案设计——IWMS导入——车辆优化,梳理了完善的阶段方案计划。对原来车辆改造升级,仓储规划设计,智能仓储系统管控、调度、远程监控以实现客户需要。方案配备了劢微自主研发的领先的激光导航系统,行驶过程中保持定位精准,一次定位精度可达±5mm,二次定位精度可达±2mm,同时采用劢微完全自主研发业界最高速度的行驶控制,大规模的机器人集群调度及机器视觉等方面的技术,实现叉车路径规划、集群调度、协调联动、状态监测、协同对接、货物识别、自动作业等功能。
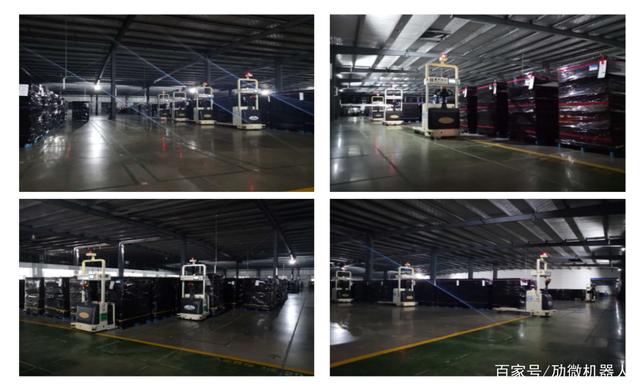
企业无人叉车场景应用
五、叉车改装优势鲜明 快速匹配客户需求
①无需更换现有叉车,无需改造现场环境
采用完全自主研发激光导航系统,可适配市面上的通用车辆运动模型,快速完成车辆改造,大大降低改造成本。
② 按周交付,不影响正常生产
按周交付制定交付计划,控制系统可在24个工作小时内完成对叉车的改造,并实现叉车路径规划、集群调度、协调联动、状态监测、协同对接、货物识别、自动作业等功能。
③智能系统,无缝对接
无缝对接MES/WMS/ERP等系统与客户现有的ERP系统无缝对接,信息实现实时查询管理。
④按需定制,满足实际需求
根据实际需求,提供定制化解决方案,如本案例中涉及到的客户原有车辆性能及一致性较差等问题,劢微提供定制化解决方案,解决客户带来实际问题。
六、自动作业降本增效 信息化是重要武器
①无轨导航、自动作业
实现了指定路线运行。从待机位置出发自主行驶到取货点,货叉取货后再行驶至放货点,结束后返回初始位置。
②定位精准、高效运行
实现了自主判断位置矫正。到达取货点和放货点时,检测并判断货叉与托盘之间的位置,若有误,依照系统设定自行改变运行路线并进行位置矫正,并且一次定位精度误差缩小至5mm内。
③信息透明,实时追溯
实现了入库信息、出库信息、盘点信息、其他状态信息及时、精细的库存信息状态透明,订单执行过程信息透明。
④安全防护,无人作业
提高了现场工作效率,消除人类易犯的错误或频发的事故,提高了员工安全性。
⑤降本增效,产能提升
智能化替代传统人工作业的模式,实现了仓库的物流自动化,提高物流搬运效率,提升生产效率,节省人工成本,实现了企业内部物流智能化、柔性化升级。

劢微机器人
深度行业融合,助力仓储物流智能化升级,劢微与您同在!












 粤公网安备 44010602004351号
粤公网安备 44010602004351号