功 能 模 块
镭神无人叉车系统
镭神无人叉车系统是一套基于多线激光雷达3D SLAM技术、拥有自主导航与避障、自动叉卸货、安全防护等功能的软硬件相结合的无人叉车本体系统,其集成了当今全球领先的多传感器信息融合(3D激光雷达+摄像头+IMU)、AI算法(深度学习算法检测识别栈板及集装箱环境)、电机驱动控制(底层运动控制)等技术,使叉车具有灵敏的环境感知与卓越的多环境适应能力,以及高鲁棒性的动态高精度定位技术特征。
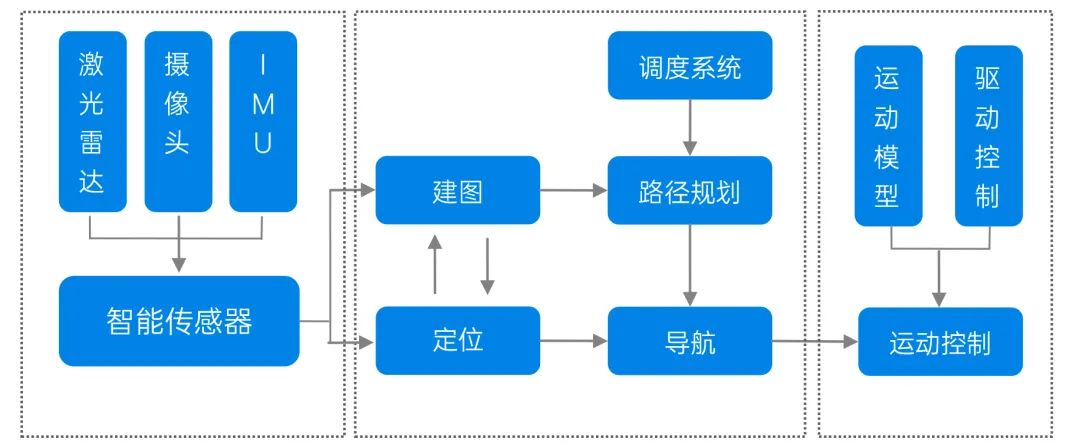
△ 无人叉车系统各模块数据流设计架构
1、高精定位导航模块
高精定位导航是镭神无人叉车系统的核心算法模块,其基于镭神多线激光雷达3D SLAM算法进行作业场景3D地图构建,同时融合里程计、IMU和激光雷达的实时点云等数据,与场景地图进行高精度匹配定位,结合实地货物目标位置可生成全局最优路径规划和航迹跟踪控制。
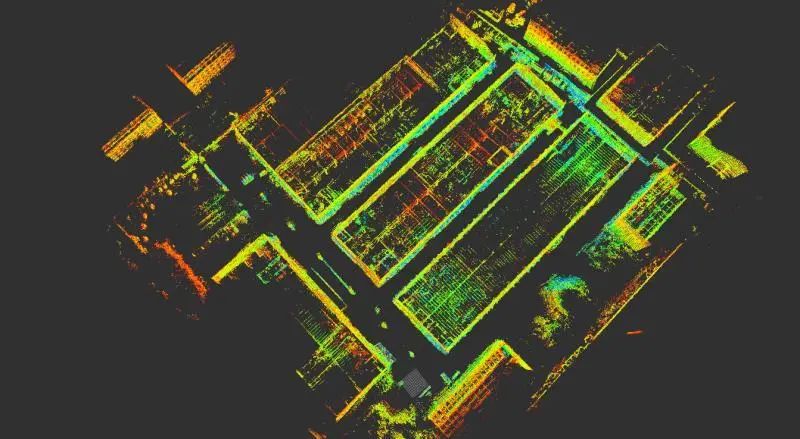
△ 3D SLAM 建图
镭神无人叉车系统三维建图面积可达百万平米;多传感器融合后的输出定位频率高达50Hz,可满足快速运动场景下即时定位的要求,在室内场景下平均导航定位精度<2cm,任务点重复定位精度<1cm,在室外大场景下平均导航定位精度<5cm,任务点重复定位精度也不超过2cm;在环境变化不大于30%的条件下,叉车可保持高度稳定的定位精度。(注:以上是软件算法层面经验定位精度数据,无人叉车实际达到定位精度因驱动器性能、底盘执行情况有所差异)
路径规划导航是无人叉车的核心功能。镭神无人叉车系统在接收智能多机调度系统下发的任务后,利用混合A*算法确定两个路径点间最优的移动路线,同时根据实时避障信息,有机结合全局规划与局部规划功能,从而进行具体的行为规划和精准的航迹控制。
2、传感器集成和运动控制模块
该模块为无人叉车系统的底层硬件及运动机构,主要包括对叉车本体及安装的各传感器信息的集成、叉车运动模型、驱动电机控制以及执行路径规划下发的线速度和角速度信息。控制板以STM32为主控,实现叉车驱动和方向控制的单舵轮驱动模型,并适配以curtis为主的多家驱动器厂家。
3、栈板智能识别与定位模块

·栈板精准定位
该模块基于深度相机或相机加单线激光雷达融合,以先进的神经网络深度学习方式识别常用栈板模型孔位,并通过激光雷达精确测算叉孔的定位坐标信息,全程无需二维码等任何额外定位辅料。
·栈板倾斜矫正
叉车在卸货点或放货点取货时,自主检测判断货叉与栈板(托盘)之间的位置,若发现栈板摆放倾斜,叉车还可自行调整运行路线进行位置矫正。
·多层栈板堆放
叉车自动识别到一层栈板后,货叉取货将依照系统设定(可配置)将栈板进行逐层堆放。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号