
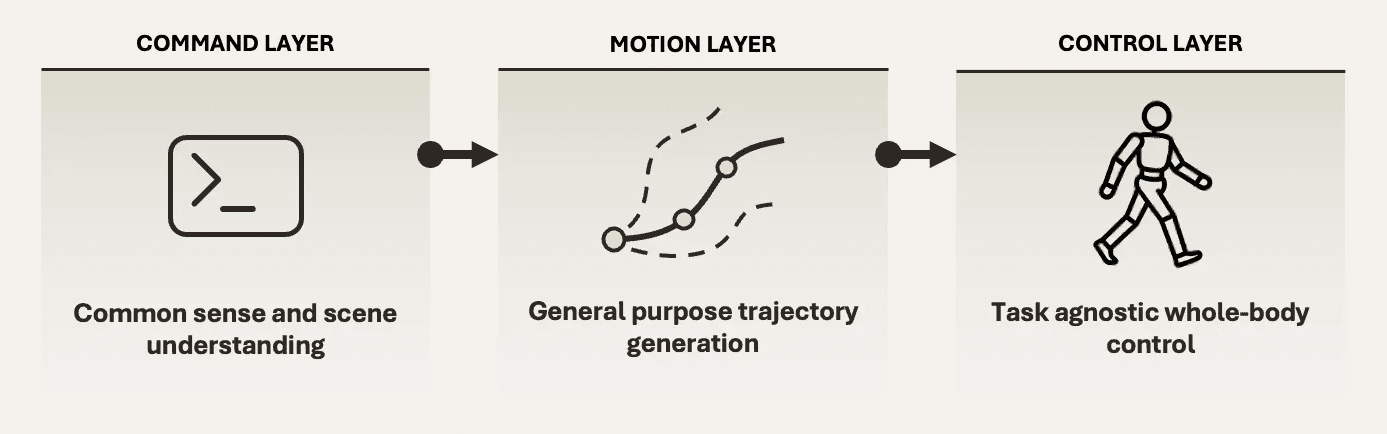
用于任务调度与常识理解的无性向/大型多人在线智能体。它能分解目标、选择工具并理解日常规范,通过提示工程与微调技术可实现预期效果编程。
通用运动生成器。根据图像、3D感知以及大语言模型生成的任务指令,该模块可规划出短时程、具备避障能力的局部运动轨迹,例如控制末端执行器抓取箱子或实现全身导航。
基于强化学习的全身追踪器。该组件能在各类地形与不同指令空间下稳定执行运动指令。
这种模块化设计避免了脆弱的端到端单体架构,并通过保持接口简洁和可测试性来提升泛化能力。关键在于我们的数据策略是非对称的:尽可能利用模拟和合成数据,仅当需要填补特定空白时才选择性引入真实数据。这与大型多样化机器人数据集(如Open-X Embodiment、RT-X)的发展趋势一致,也符合提示驱动操作研究(如VIMA)的发现——数据广度有助于提升规划和感知能力。与此同时,控制系统始终基于物理真实的训练环境。







 粤公网安备 44010602004351号
粤公网安备 44010602004351号