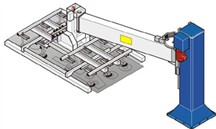
发动机/机床上下料机械手
机械手技术说明
1. 上料机工作工位: 多工位
2. 工件最大重量: 1000KG
3. 最大规格: 不等mm (特殊规格需要另行设计)
4. 搬运速度:20秒~40秒~60秒(根据不同工件并设有多个档位供选择)。
5. 堆垛车最大行走距离: 15m
6. 堆垛车行走定位精度: ±1mm
机械手·主要特点
1. 堆垛机械手行走桁架设计给操作人员留有较大操作空间,便于装运和保证操作人员安全。
2. 吸盘车行走和升降全部采用伺服电机驱动,动作灵活,定位精确。
3. 由于升降系统给工件的压力较小,所以可以对较精密部件进行堆垛。
4. 吸盘车行走轮采用包高硬度尼龙轮,行走噪音小。
5. 行走传动采用进口高强钢丝齿型带,无须润滑,无噪声。
6. 配备工件检测装置,能自动修正主线工件偏移造成的工件偏离中心线的误差。
7. 自动检测工件规格,从而自动决定堆垛车位置和挡板位置。
8. 采用进口高柔性电缆和环形拖索,保证长期运行可靠。
9. 吸盘车自动取纸,使人工辅助敷纸方式更安全更快捷。
10. 除钢结构件喷漆外,全部采用喷塑处理,外形美观。
11. 可移动式堆垛车使堆垛方式更灵活。
12. 在人机界面上显示报警类型。
13. 人机界面模拟显示堆垛机工作状态和修改参数,显示直观,操作方便灵活。
14. 软件设计充分考虑了运行中可能发生的意外情况,编制了各种相应的处理程序,确保设备安全和人身安全。
15. 与主线控制系统连接简单方便,本机就放置规格检测装置,还可提供串行通讯接口,用来传送诸如玻璃规格、玻璃等级等参数。
16. 电气控制系统全部采用进口元件。
17. 气动元件全部采用进口产品。
------------------------------------------
工业机械手介绍:
manipulator
一种模拟人手操作的自动机械。它可按固定程序抓取、搬运物件或操持工具完成某些特定操作。应用机械手可以代替人从事单调、重复或繁重的体力劳动,实现生产的机械化和自动化,代替人在有害环境下的手工操作,改善劳动条件,保证人身安全。20世纪40年代后期,美国在原子能实验中,首先采用机械手搬运放射性材料,人在安全室操纵机械手进行各种操作和实验。50年代以后,机械手逐步推广到工业生产部门,用于在高温、污染严重的地方取放工件和装卸材料,也作为机床的辅助装置在自动机床、
自动生产线和
加工中心中应用,完成上下料或从刀库中取放刀具并按固定程序更换刀具等操作。机械手主要由手部机构和运动机构组成。手部机构随使用场合和操作对象而不同,常见的有夹持、托持和吸附等类型。运动机构一般由液压、气动、电气装置驱动。机械手可独立地实现伸缩、旋转和升降等运动,一般有2~3个自由度。机械手广泛用于机械制造、冶金、轻工和原子能等部门。
机械手
mechanical hand
能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体 ,需有 6个自由度 。自由度是机 械手设计的关 键参数 。自由 度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手 ;按适用范围可分为专用机械手和通用机械手两种 ;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。
")












 粤公网安备 44010602004351号
粤公网安备 44010602004351号