2023 年 11 月 30 日,日本东芝基础设施系统公司宣布,他们已经开发出一种利用无线电地图控制机器人移动路径的技术。该技术利用本地 5G,成功地实时控制了一组移动机器人。
通过将机器人的 "大脑 "功能集中在服务器上,并专门负责机器人本身的 "搬运 "功能,可以实时控制一组 12 个机器人。本地 5G 的低延迟和低波动特性解决了机器人因无线电延迟和干扰而停止的问题。该技术有望降低机器人的成本和功耗,并通过减少充电频率提高运行率。
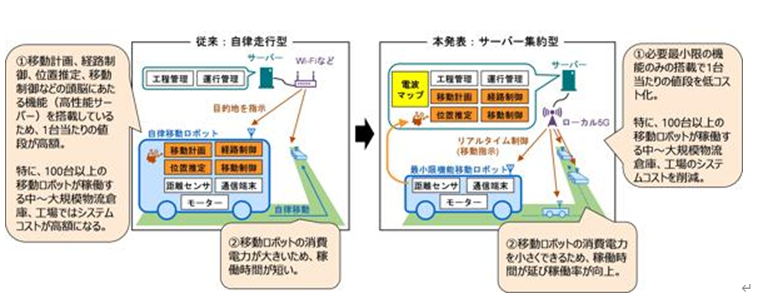
自动输送系统图片
此外,货物在配送仓库和工厂中不断移动,导致无线电波环境发生变化。为此,我们开发了利用服务器实时映射机器人监测和传输的本地5G电波状况的技术,并控制机器人的行进路线。服务器根据无线电波图的变化预测无线电波的接收强度并选择路线,让机器人群不停地移动。
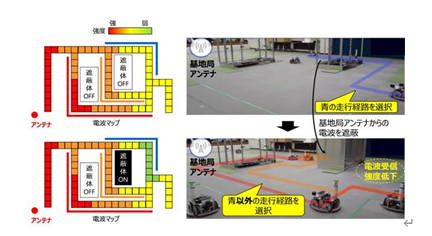
基于无线电地图的行驶路线控制技术演示
该技术的系统配置可根据机器人数量进行扩展,可应用于100台以上机器人运行的物流仓库和工厂。例如,假设运行100个机器人,引入自动运输系统的成本将降低约10%。通过缩小机器人本身的功能,预计功耗将减少约14%,作业率将提高约16%。
此外,东芝还正在开发协作运输技术,允许多个机器人通过机器人之间直接通信来运输单个物体。无需根据货物的大小和重量安装多个机器人,从而降低了引入自动运输系统的成本。
该开发项目是NEDO(新能源产业技术综合开发机构)委托的“后5G信息通信系统基础设施强化研究开发项目”的一部分。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号