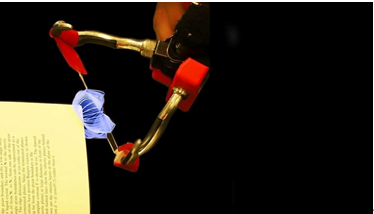
机器人夹具足够轻柔,可以翻书页。(图片来源:美国北卡罗来纳州立大学)
美国北卡罗来纳州立大学的科学家开发出了一种新型机器人抓取装置,新开发的设备足够轻柔,可以拾取一滴水;强度足以拾取 6.4 公斤(14.1 磅)的重量;足够灵巧,可以折叠一块布;并且足够准确,可以拾取比传统胶片薄近 20 倍的缩微胶卷。到人类的头发。
除了可能的制造应用之外,该大学的科学家们还将该设备与技术相结合,使夹具能够通过前臂肌肉产生的电信号进行调节,从而说明其与机器人假肢一起使用的能力。
美国北卡罗莱纳州立大学机械与航空航天工程副教授jie yin说:“由于强度、精度和轻柔性之间的权衡,开发一种能够处理超软、超薄和重物体的单一软夹具是很困难的。我们的设计实现了这些特性的完美平衡。”
新型夹具的设计依赖于上一代适应性强的机器人夹具,该夹具借鉴了剪纸艺术。这涉及切割和折叠二维材料片以形成三维形状。
“我们的新夹具也使用剪纸,但有很大不同,因为我们从以前的设计中学到了很多东西。我们已经能够改进基本结构本身,以及夹具的轨迹,即夹具在抓取物体时接近物体的路径。” 。毕业于北卡罗来纳州立大学该论文的合著者、博士生 Yaoye Hong 说道。
由于新设计如何在夹具结构上分配力,因此有可能实现高度的强度和柔和度。
机器人夹具的强度通常以有效负载重量比来衡量。我们的夹具重 0.4 克,最多可举起 6.4 公斤。有效载荷重量比约为 16,000。这比之前的有效载荷重量比记录(6,400)高出 2.5 倍。结合其轻柔和精确的特性,夹具的强度表明其应用范围广泛。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号