ToF(Time-of-Flight)感知技术作为三维视觉成像领域主流技术之一,发展迅猛,伴随着半导体元器件尺寸的不断缩小,结构紧凑、极具性价比优势的TOF深度相机得到了越来越多的行业关注,在工业和消费电子领域针对整个场景的多点3D视觉、3D建模辅助、3D深度感知等场景,应用需求日益增加。
ToF深度相机是一种主动成像的方式,即相机系统向目标发射激光,通过接收端传感器感知到目标反射光的时间,从而计算出目标与相机之间的距离。TOF深度相机技术是通过一次性成像来提供完整场景深度图,无扫描器件,成像速度快,计算负荷低,不论对于移动中的物体,还是静态的物体,不论在黑暗环境中,还是在室外光照较强烈的环境中,不论对于低反射率还是高反射率的物体,都有机会获取到较为理想的深度数据。
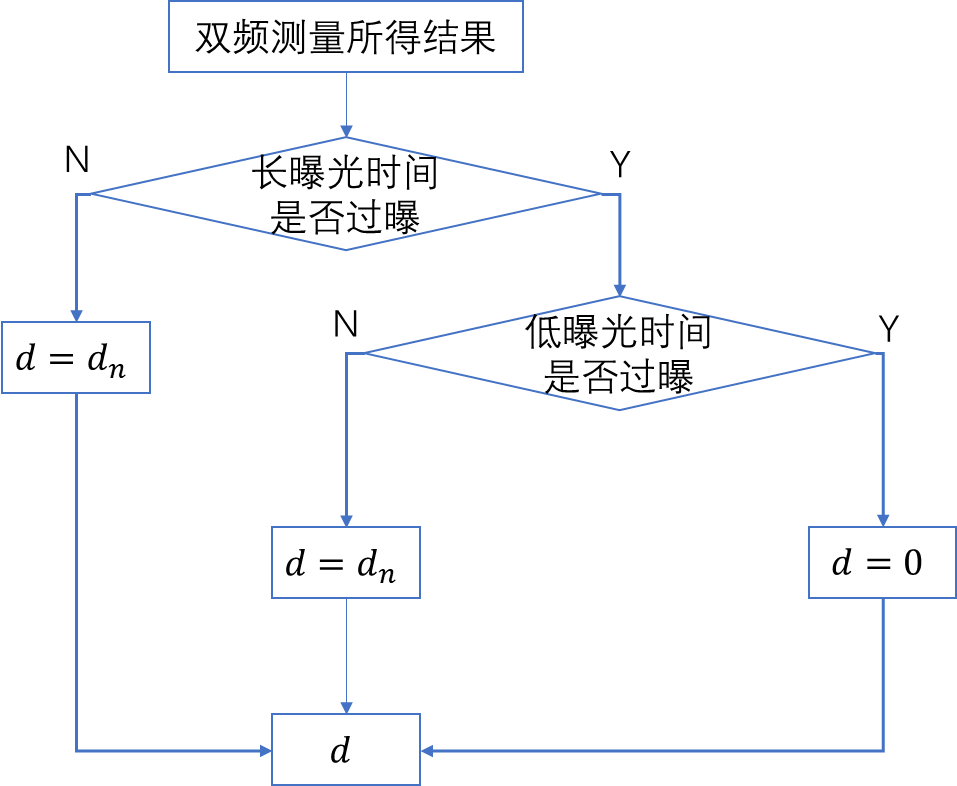
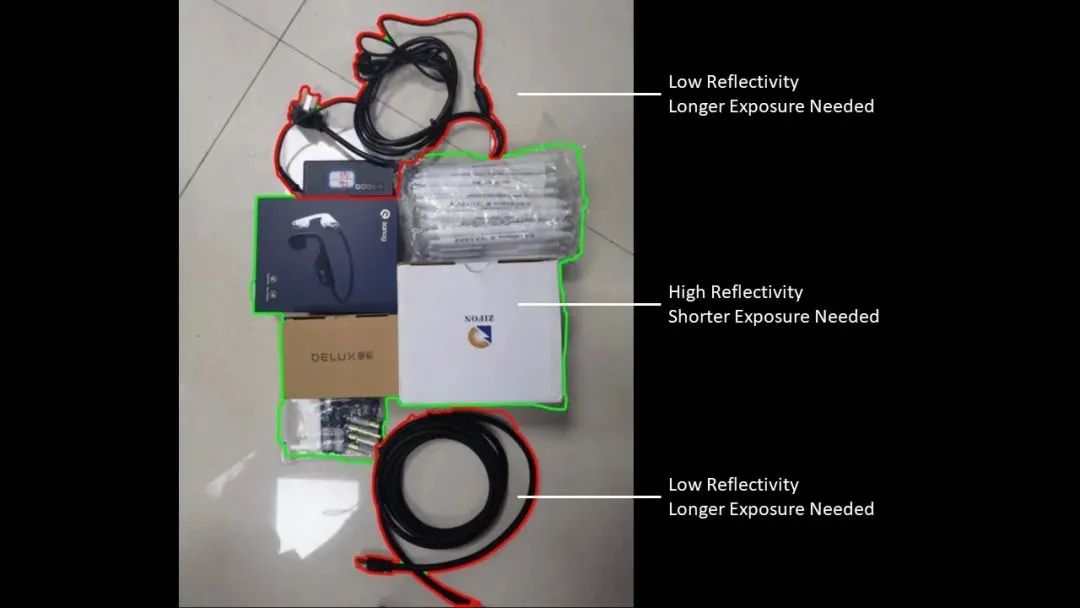
鉴于上述优点 ToF相机已经越来越多地应用于3D检测与识别、AGV避障、机械手抓取、体积测量等工业场景中。 图1 ToF相机原理图示 本文重点介绍在复杂环境中,当同时存在高反光率物体如金属件与低反光率如黑色表面物体时,如何通过技术手段提升ToF相机的检测精度。 首先,从ToF相机的检测原理来理解这个问题,当采用固定曝光时间模式时,相机在同时拍摄高反射率与低反射率物体时,较难将曝光时间调到一个均衡的位置,可同时准确地捕捉到高反射率与低反射率物体的深度图像;当我们增加曝光时间时,利于黑色物体的识别,但近距离区域容易出现过曝的现象;而降低曝光时间时,对于低反射率物体的识别又会存在点云缺失的现象。 为了解决这个问题,维感科技在ToF相机曝光时间方面增加了HDR高动态范围模式:即通过设置多个不同曝光时间的方式,将采集到的多个图像合成到一帧中,完成对整个复杂场景的成像。 在针对距离较近易过曝的区域与高反射率物体时,利用短曝光时间进行成像;在针对低反射率的物体时,利用长曝光时间进行成像,最终将不同曝光时间下取得的图像合成到一帧中,从而获得更为精确的深度图像,减少距离远近与物体反射率差异对ToF相机深度检测数据的影响。 图2 HDR模式下,针对不同曝光时间的距离测量判断图示 下面将通过两个实例解释ToF相机如何通过开启HDR功能来改善对复杂场景中同时存在高低反射率物体时的拍摄效果。 实例一 拍摄下述杂乱物体 图3 被拍摄的杂乱复杂物体 未开启HDR模式 单一低曝光时间的情况下,低反射率的黑色胶皮线点云数据缺失; 图4 未开启HDR模式,使用单一低曝光时间时,杂乱复杂物体的成像效果 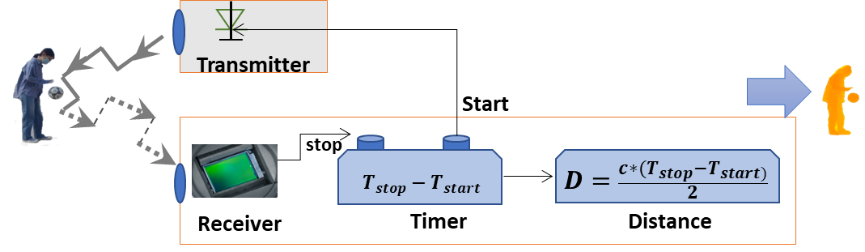














 粤公网安备 44010602004351号
粤公网安备 44010602004351号