华裔美国机器人开发商Flexiv公司宣布了一种 "革命性的 "机器人抓手,它几乎可以举起任何适合其抓取的东西,包括形状怪异或表面纹理不平整的物品。Flexiv公司说,Grav机械手使用了仿照壁虎脚的粘性材料,代表了下一代机械手的发展方向。
该机械手具有力控制能力,使其能够感知子程序区域的阻力。它可以插入微型部件,转移脆弱的物体或用于机器维护。
该机械手旨在减少臂端工具的更换频率,最初设计用于Flexiv的Rizon自适应力控制机器人。然而,对同时操作传统cobot(协作机器人)的用户进行的测试表明,其需求超出了公司现有客户的范围。
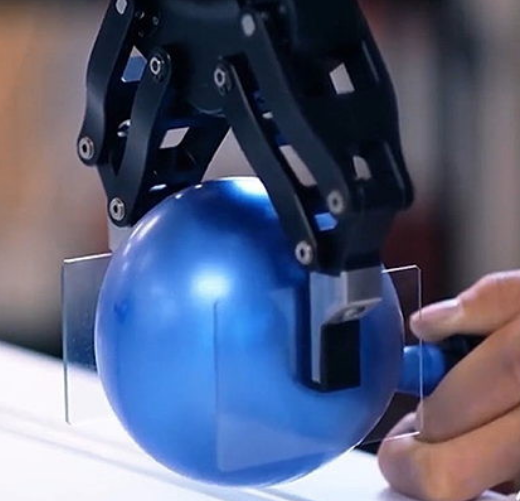
"我们研究Grav抓手已经有一段时间了,因为我们想要一个与Rizon自适应机器人系列一样采用工业级力控制的抓手。"Flexiv的首席机电工程师Ryan Coulson解释说:"我们不仅成功地实现了力控制,而且由于壁虎材料的存在,我们还赋予了该机械手处理球体等传统困难物体的能力。"
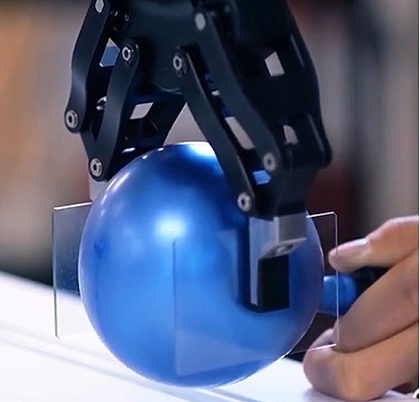
Grav 夹具可以夹住笨拙的形状和表面,例如气球的形状和表面
Flexiv 的自适应机器人使用通用的臂端插座。只需进行少量修改即可使新夹具与其他协作机器人兼












 粤公网安备 44010602004351号
粤公网安备 44010602004351号