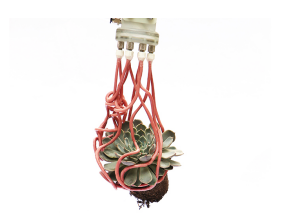
哈佛的触手状抓手缠绕着多肉植物。|资料来源:哈佛微型机器人实验室/哈佛 SEAS
美国哈佛大学约翰-A-保尔森工程与应用科学学院(SEAS)的研究人员创造了一种类似于触角的抓手,可以抓取不规则形状或柔软的物体而不损坏它们。
该抓手由许多薄而柔软的触手组成,这些触手依靠通货膨胀将自己包裹在物体上,没有任何感应、计划或反馈控制。单独地看,每个触手都太弱了,无法拿起许多物体,但如果许多触手一起工作,抓手就可以轻轻地举起沉重和形状古怪的物体。
每个触手都是由一英尺长的空心橡胶管组成的。管子的一侧是用较厚的塑料制成的,所以当管子受压时,它会像小辫子一样卷曲。当管子卷曲时,它将自己缠绕在一个物体上。每增加一个触角都会增加这种抓取的强度。抓取器通过简单地给触手减压来释放物体。
在设计该抓取器时,研究小组从大自然中获得了灵感。该夹持器的触手的作用类似于水母使其猎物眩晕的方式。
为了测试该夹持器的有效性,研究小组使用了模拟和实验,让该夹持器负责处理一系列物体,包括不同的家庭植物和玩具。
研究小组希望该抓手可以用来抓取脆弱的物体,如农业生产和分配中的柔软水果和蔬菜,医疗环境中的脆弱组织,以及仓库中不规则形状的物体,如玻璃制品。这种抓手可以取代传统的抓手,这些抓手依靠嵌入式传感器、复杂的反馈回路和先进的机器学习算法来工作。
该团队的研究发表在《美国国家科学院院刊》(PNAS)上。它是由Clark Teeple、Nicholas Charles、Yeonsu Jung、Daniel Baum和James C. Weaver共同撰写的,并得到了海军研究办公室、国家科学基金会、西蒙斯基金会和Henri Seydoux基金的支持。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号