——升降机构——
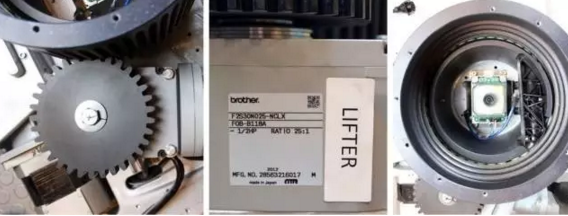
齿轮箱,升降电机和大口径滚珠丝杠
升降机构使用了一个定制的滚珠丝杠,经由一个标准尼龙齿轮和电机连接。升降机使用的电机和两个驱动轮电机是同一款Pittman电机。它能够输出约3N*M的扭矩和1KW的堵转功率。电机输出轴经过25:1的日本Brother齿轮箱,能在72rpm输出46N*M的扭矩。这款齿轮箱单价高达1000美金,想必大量订货的话会便宜不少。
——底盘和驱动轮——

把升降结构拆下来后,我们可以把机器人翻个底朝天来看一看其底盘上的驱动装置。两个电机以及其齿轮箱和升降电机相同,两个定制的轮子组成可以原地旋转的差分结构。

三个砂铸铝部件构成了机器人底盘的大部分。它们由简单的U形夹销连接,形成一个简单的被动双悬挂结构。 同样,这些铝件采用319合金,以及先铸造再精加工的工艺。注意下图中底盘上加工出来的散热结构,其背面装着的正是电机驱动器的巨型MOSFET。这种结构可以自然地利用底盘来以获得最大的散热效率。

连接悬挂结构的U型夹销,底盘上的散热片
——电子元件——
要让Kiva机器人身上这三个大功率电机和一身的传感器长时间可靠地工作,电子设备的设计是相当重要的一环。
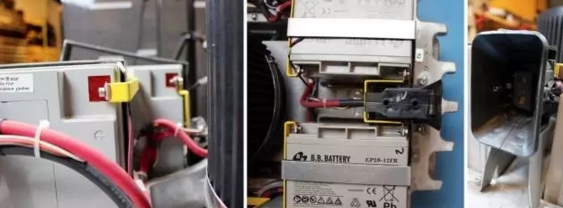
——电池模块——












 粤公网安备 44010602004351号
粤公网安备 44010602004351号