机器人的进化源于它们理解其移动空间以及独立但协作地前进的能力。美国麻省理工学院的卢卡·卡龙 (Luca Carlone) 正在研究这个问题
我们人类认为这是理所当然的,但机器人的空间感知却并不简单。对人类来说,几乎可以立即了解周围环境,探测有关图案、物体及其在环境中位置的复杂信息是直观的,但对机器来说,这是一个非常复杂的问题。不过,有些人正在努力使机器人系统也能做到这一点:麻省理工学院(MIT)的 SPARK 实验室就是这方面最先进的机构之一。感知、知觉、自主和机器人动力学实验室 "的主任是航空航天系副教授、美国麻省理工学院信息与决策系统实验室(LIDS)首席研究员卢卡-卡隆(Luca Carlone)。
卡洛尼出生于意大利,拥有都灵理工大学机电一体化工程专业的学位,多年来一直从事智能机器人系统的研究,并获得了众多奖项。
Luca Carlone,“传感、感知、自主和机器人动力学实验室”主任,航空航天系副教授,麻省理工学院信息与实验室首席研究员。决策系统(LIDS)。
特别是,他和他所领导的实验室的兴趣集中在空间感知,或者机器人感知和理解周围环境的能力。它是人类移动、操纵和互动的关键因素。算法和感知系统的最新进展使机器人能够创建未知环境的大规模几何地图并检测感兴趣的物体。尽管取得了这些进步,机器人和人类的感知之间仍然存在很大差距。这就是卢卡·卡龙 (Luca Carlone) 工作的地方,他坚信在这个问题上取得重大进展将对许多行业产生重大影响,机器人在“行业自动驾驶汽车的开发。只有最后一个市场预计将大幅增长:Statista 估计到 2030 年,该市场的规模将从 2021 年的 1060 亿美元增至 23,000 亿美元。
要点
对于人类来说,机器人的空间感知是本能和自然的,是一个高度复杂的问题,但它是保证它们能够在最不同的环境中独立、安全移动的基础。
美国麻省理工学院的 Spark 实验室由麻省理工学院教授、意大利人卢卡·卡龙 (Luca Carlone) 领导,正在努力创造条件,使机器人系统能够依赖尽可能类似于人类感知的空间感知。
由于人工智能技术的采用,许多多机器人系统也带来了前景:从搜索和救援行动到工业自动化,再到物流和自动驾驶汽车。
机器人空间感知今天取得的进展
正如 MIT 最近发表的一篇文章所报道的,由 Carlone 领导的团队开发并发布了 Kimera,这是一个开源库,它允许单个机器人实时构建其环境的三维地图,标记视野中的不同物体。两年后的 2022 年,Carlone 和 Jonathan How(SPARK 实验室和航空航天控制实验室)的研究小组推出了Kimera-Multi,这是一个更新的系统,其中多个机器人相互通信以创建统一的地图。这一发现和发表的论文为 Carlone 和 How 及其研究团队赢得了IEEE Transactions on Robotics Fu King-Sun Memorial Best Paper Award 2023,授予上一年在该杂志上发表的最佳文章。
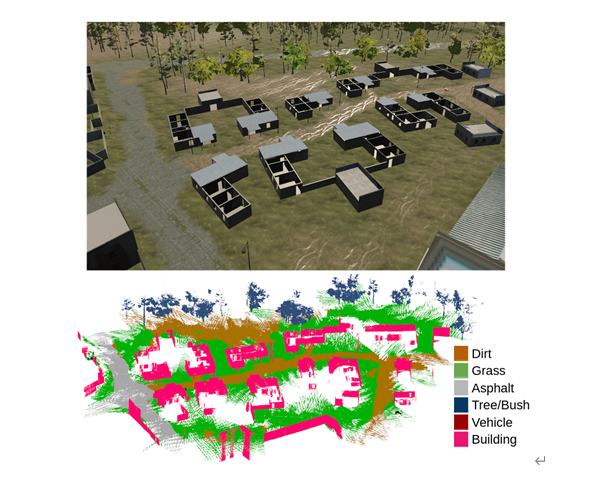
复杂环境中的机器人运动(Kimera-Multi)
Carlone教授,机器人的空间感知需要考虑哪些方面?

除了相当重要之外,机器人的空间感知也是一个令人着迷的问题,因为我们作为人类解决这个问题的容易程度与机器人解决这些挑战的强大技术难度相对应。莫拉维克悖论很好地解释了这一点,该悖论指出:人工智能困难的事情看起来很简单,而简单的事情看起来很困难。让我们想象一下人工智能系统在下国际象棋或围棋或在很短的时间内为人类解决需要高推理能力的复杂问题的轻松程度。相反,在环境中移动或操纵物体,即使对于孩子来说,这种与生俱来的简单能力对于机器人来说仍然非常关键。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号