
黑盒,是飞机上用来记录飞行数据的设备,它可以在空难发生时提供重要的线索,帮助调查人员找出事故原因。同样地,在搭载了科尔摩根AGV系统的AGV车辆中,也集成有这样的一个黑盒,它记录着AGV的各种数据,如导航、CAN总线、WLAN、系统事件等。
当AGV发生故障时,通过分析黑盒,就能看到AGV发生故障时的情况,从而快速定位和解决问题。
激光导航因其定位精准、路径灵活多变、环境适应性强等特点,深受制造业企业的青睐。然而在AGV的日常应用中,不免会出现反射器导航不佳的情况,即因AGV导航数据失准而导致的导航丢失、定位不准等现象,严重影响了AGV的正常运行和效率。
那么,当问题发生时,我们该如何借助黑盒进行故障分析?又该如何修复呢?

STEP1 打开黑盒
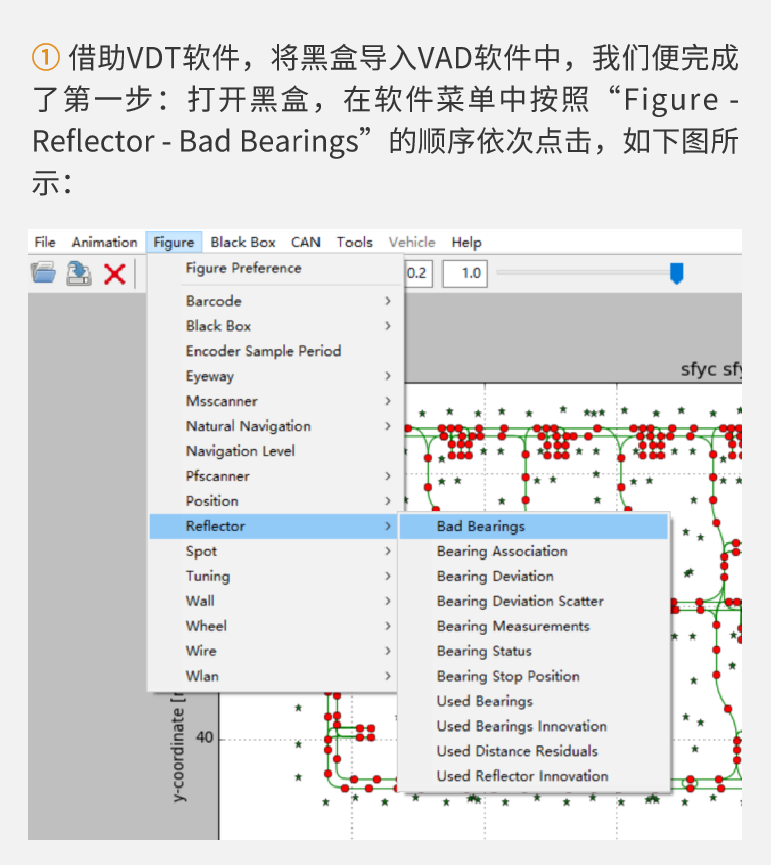
左右滑动查看更多
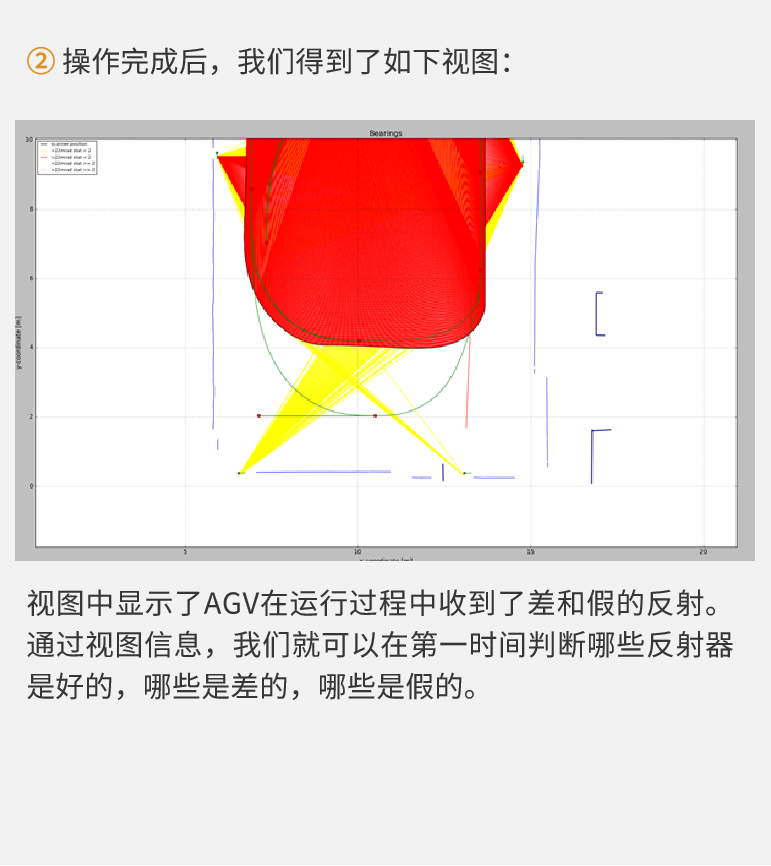
STEP2 分析放射源那么,如何分析反射源呢?其实很简单,只需要记住三种颜色:绿色、黄色和红色。

对于偏差范围的界定,是由最大距离偏差和最大角度偏差计算而来的。但实际上,不同的激光扫描仪(如LS2000或者MicroScan3)有着不同的偏差计算方法,需结合实际情况进行具体调整。示例
我们知道,AGV的导航分为两个阶段,一个是初始化导航阶段,一个是正常连续导航阶段。
示例一
初始化导航阶段
搭载1个LS2000激光扫描仪
计算偏差
··

示例二
正常连续导航阶段
搭载2个MicroScan3激光扫描仪
计算偏差
··

在上文的两个示例中,我们以精确的计算为反射线划分了不同的颜色,在不同的偏差范围内反射线呈现的颜色即代表着它们的好坏。
如果我们看到一个绿色的反射线,就说明它的距离和角度都在好的范围内,就可以判断为好反射;
如果我们看到一个黄色的反射线,就说明它的距离或角度在差的范围内,就可以判断为差反射;
如果我们看到一个红色的反射线,就说明它是个假反射,不能用作导航。
STEP3 找出原因通过分析反射线的颜色和方位,可以帮助我们判断出导致导航不佳的一些常见原因。这里我们以不同的反射线分布为例,并附上相应的故障解决方法,希望能够对大家有所帮助。
01
反射器被部分挡住
02
反射器测量不良
03
反光材料
04
Layout中缺少反射器
05
AGV打滑
在AGV的日常应用中,难免会出现导航不佳的情况。现在有了科尔摩根AGV黑盒作辅助,可以更加快速地发现问题所在,并及时排除故障根源,保障了AGV的精确、高效运行。

Kollmorgen AGV在过去的50多年里,通过NDC平台为自动导引车(AGV)和移动机器人提供了车辆自动化解决方案。通过OEM和系统集成商合作伙伴的生态体系,在全球范围内为各种应用部署了数万辆先进的自动引导车辆。
科尔摩根AGV的解决方案由:系统、车辆、软件工具和服务组成。其中NDC平台不仅支持目前市面上多种主流导航方式,如激光导航,自然导航,二维码导航等,还支持他们的组合导航方式。同时,NDC平台包括用于管理车队和有效引导车辆的软件,以及用于导航和控制的硬件。后期,科尔摩根AGV 定期为合作伙伴提供技术支持,培训,咨询等服务。
使用Kollmorgen NDC8,合作伙伴几乎可以实现不同类型的车辆或移动机器人的自动化,并将其集成到全球任何行业的任何类型的应用场景中。为终端用户降低从前期项目实施到后期系统运维各方的实际成本。













 粤公网安备 44010602004351号
粤公网安备 44010602004351号