你是否在寻找开始你的公司的机器人发展的方法?或者你已经在开发机器人,并在寻找使它们更智能的方法?
无论哪种方式,我们都有三个方面的东西要告诉你。
自主移动机器人(AMRs)是一种机器人,它们用机械来增强人类的努力。它们是自主的,因为它们被设计为在没有人类持续干预的情况下执行有用的工作。它们是移动的,因为它们可以很容易地将自己从一个地方移动到另一个地方来执行工作。
我们最近举办了一次网络研讨会,名为 "自主移动机器人的设计考虑",它与开发者对AMR的共同特征的观点相一致。它涵盖了传感器、智能和计算引擎之间的关系,这些都是设计AMR的一般内容,但特别是在快速增长的电子商务履行的应用部门。
电子商务履行 AMR
到 2025 年,全球将有多达400 万个商用机器人在 50,000 个仓库中运行。他们将执行接收、拣选、分类、包装等工作,并简单地将货物从仓库自动从 A 点移动到 B 点。
执行这项工作取决于四个主要功能:
●感知
●思维
●行动
●沟通
当然,对于仓库工人来说,您可以认为这些功能是理所当然的。但是对于机器人,你必须内置它们,具有传感器、算法、计算机视觉和人工智能等功能。再加上异构计算,让一切顺利运行。
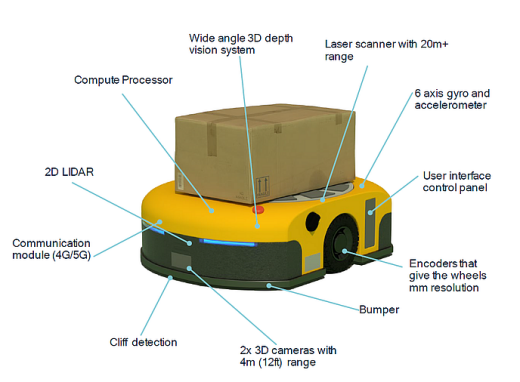
下图中的 AMR,通常用于电子商务履行,就是一个很好的例子。
将自主权分解为任务
现在想想 AMR 需要执行的任务以及它将如何使用这些功能和异构计算来执行它们。
以 3D 方式查看周围环境
AMR 使用传感器和摄像头不仅可以感知附近的物体,还可以了解它们之间的物理关系。这意味着处理来自以下组件的提要:
●结构光相机——解码场景中像素的投影图案
●飞行时间相机——测量光传播的距离
●立体相机——从不同的相机捕捉多张照片
●激光雷达——用激光照射目标并分析反射光
●SONAR — 发出声音脉冲并聆听回声
创建周围环境的 3D 地图
根据摄像头的反馈,AMR 使用同步定位和映射 (SLAM)在它四处移动时构建其环境的 3D 地图。
找出它在地图上的位置
接下来是定位,其中 AMR 确定它在 3D 地图上的位置。它将来自摄像机的运动数据与来自传感器和车轮编码器的惯性数据相结合,以更好地估计运动并提高定位的准确性。
SLAM有两种方法:
●视觉 SLAM——使用与惯性测量单元 (IMU) 配对的相机。
●LIDAR SLAM — 使用与 IMU 配对的激光传感器;在一维上更准确,但往往更昂贵。
请注意,5G 在本地化中发挥作用。仓库和履行中心的私有 5G 网络可以增强 SLAM 的机载方法。
导航
一旦 AMR 有了地图并知道它在地图上的位置,它就可以在其环境中导航。导航涉及:
●场景理解——使用深度传感器和机器学习来构建环境的空间和语义模型
●路径规划——寻找穿越环境的最佳路径并在避开障碍物的同时满足高级目标
●实时控制——通过将所需速度和方向转化为电机命令来实施运动计划
●运动估计——估计地图上位置的变化。有了新的位置和环境,AMR 会更新规划的路径。
导航包括适应人、货架和墙壁等环境元素的变化。AMR 依靠激光雷达检测变化,并使用机器学习来完善导航目标。他们还可以利用室内精确定位,使用 5G 传输点/接收点 (TRP) 绘制网格,用于在 x、y 和 z 轴上实现厘米级精度。
识别物体并避开障碍物
AMR 必须识别物体并与之交互并绕过障碍物。这意味着他们必须严重依赖计算机视觉和人工智能,因为他们不断学习识别物体。高性能 AMR 在设备上执行这些功能,而不是将数据往返于云端。

Qualcomm Robotics RB5 AMR 参考设计是 Qualcomm Technologies, Inc. 和/或其子公司的产品。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号