
3D激光雷达+3D SLAM建图定位盒子功能
镭神智能3D SLAM定位盒子是以 3D 激光雷达为主传感器的建图定位核心软硬件产品,通过对激光雷达、IMU、里程计、GPS等各类传感器进行数据融合处理,配置高性能处理器实现对无人车环境的建图以及匹配定位功能,同时结合配套的以太网通信开发接口,使各种应用场景类的低速无人车、机器人、无人叉车、AGV等低速智能移动载体,达到客户的精确定位需求。
实时3D建图,定位精确稳定
激光雷达3D SLAM建图定位盒子以多线激光雷达为主传感器,对移动载体工作的区域环境进行扫描探测,利用激光3D SLAM技术进行百万平大场景增量实时地图建模,从而为路径规划和后端匹配定位提供精确的三维高精地图信息。
室内场景下,平均定位精度达到2cm以内,任务点定位精度在1cm以内。
室外复杂场景下,平均定位精度达到3cm以内,任务点定位精度在2cm以内
在环境变化不大于 30%的条件下,可稳定保持定位精度。
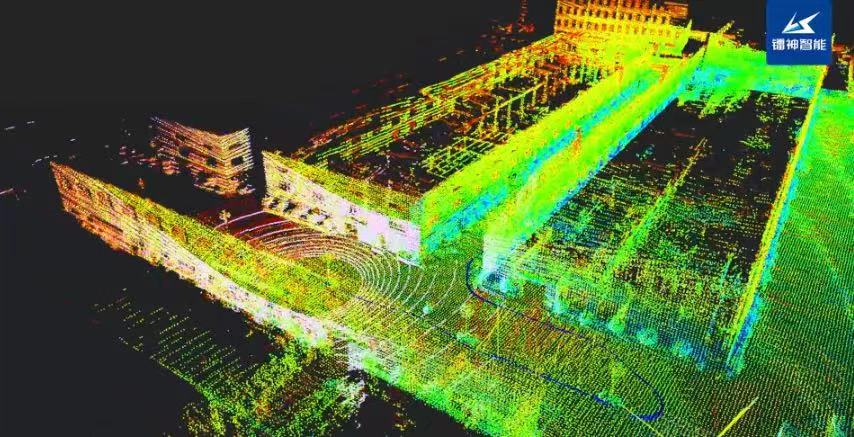
3D SLAM仓库环境地图构建
部署灵活便捷
采用激光场景地图构建匹配定位(即自然导航),部署方式无需在环境中部署辅助设施,无需增加或扩建仓库等工作场景,仅需一台定位设备,可在后台操作增量建图和配置,便可在多台设备上共享数据完成地图构建。

适用于99%以上复杂的室内外环境
采用3D SLAM 建图和多传感器融合匹配定位,不受室内外光线干扰,定位稳定性高且不受场景中货物摆放的变化影响,适合绝大部分复杂的室内外环境。
助力用户降本增效
激光雷达3D SLAM建图定位盒子可支持7x24小时连续作业,帮助客户降低用人成本,提高作业效率。
应用领域广泛
本产品可搭载各种叉车、AGV、移动式机器人、无人车等移动载体,广泛适用于物流、制造、换电、造纸、纺织、化纤、皮革、食品、化妆、配件等众多领域,助力各行业智能化转型。目前,镭神智能该项技术合作的企业数约有七十余家,代表性客户有:顺丰速运、东风汽车、潍柴动力股份有限公司、政府消防仓库等.

基于在多行业的实际应用中,镭神智能积累了丰富的实践经验,进一步优化产品性能,为不同行业客户提供对应的系统方案。
镭神智能秉承着民族自信与民族力量,自觉肩负国家发展重任,不断通过科技创新为中国制造的高端化转型去积淀力量,让世界看到中国制造业的优势已经突破制造层面,在研发与技术领域引领世界,让“中国制造”转变为“中国智造”。
同时,镭神智能将坚持钻研技术,从产品设计到生产制造工艺不断优化升级,深度集成产业链资源,实现全国产化自研自产,为自动驾驶、智慧交通、智慧物流、工业自动化、机器人、智慧港口、安防、测绘等产业提供高价值、低成本的基于激光雷达的核心硬件和软件算法产品,助力推动各产业实现智能化升级。
2022年9月27日,镭神智能车规激光雷达受邀参与“奋进新时代”主题成就展,是“方寸之间”单元唯一一家激光雷达企业代表。
深圳市镭神智能系统有限公司成立于2015年2月,是一家纯内资的国家级高新技术企业,以强大的自主研发实力成为全球领先的全场景激光雷达及整体解决方案提供商,致力于打造全国产化的高性能激光雷达及行业应用方案,秉持着“让驾驶更安全,让机器更智能,让生活更美好”的使命,以高端、稳定、可靠的激光雷达环境感知技术赋能产业升级,服务覆盖自动驾驶、智慧交通、轨道交通、通用航空、机器人、智慧物流、高端安防、港口、测绘及工业自动化等十大产业生态圈,以卓而不同的感知精品为客户创造价值,立足全球构建智能感知的黄金时代。
镭神智能始终坚守“专业 · 创新 · 品质”,经过8年的努力得到了国家及省级政府的认可,荣膺2020年度国家科技进步二等奖,是国家工信部评选的新一代人工智能产业创新重点任务揭榜优胜单位,入选国家级 “专精特新”小巨人企业名单,是广东省唯一一家激光雷达工程技术研究中心。
镭神智能同时掌握了TOF时间飞行法、相位法、三角法和调频连续波等四种测量原理,打造了齐全的激光雷达产品矩阵,包括1550nm光纤激光雷达、905nm混合固态激光雷达、多线机械式激光雷达、单线机械式激光雷达、Flash激光雷达、FMCW激光雷达并深度集成垂直产业链资源,自研自产激光雷达收发集成电路芯片、1550nm光纤激光器及十多种高功率核心器件等关键核心器件,并掌握半导体封装工艺,建立了激光雷达自动化及半自动化产线,彻底攻克我国被“卡脖子”的35项关键技术之一的激光雷达技术问题,并获《人民日报》报道。
目前,镭神智能已申请专利561项,其中发明专利271件,实用新型151件,外观设计112件,PCT申请27件;目前授权专利335项,包括:发明88件,实用新型144件,外观设计103件;已获批软件著作权49项;已授权集成电路版图设计3项。












 粤公网安备 44010602004351号
粤公网安备 44010602004351号